Product
product
CIMT Drone
A Breakthrough Drone Sensor for Saving Lives and Inspecting Infrastructure
Overview
The CIMT Drone is a next-generation drone sensor system designed to detect survivors buried under rubble after disasters, using a unique non-contact sensing technology.
In large-scale disasters such as earthquakes, landslides, or building collapses, people trapped under debris are often said to have a critical survival window of approximately 72 hours. Rapid identification of survivor locations during this period is crucial for saving lives.
The CIMT Drone enables rescuers to locate buried survivors from the air, even when they are hidden under rubble or soil. Multiple drones can work together to efficiently scan wide disaster areas and create location maps of potential survivors.
Core Technology: What Is CIMT?
The CIMT Drone uses an original technology developed by POSH WELLNESS LABORATORY Inc., called CIMT (Current-Induced Magnetic Tomography), which is protected by patents.
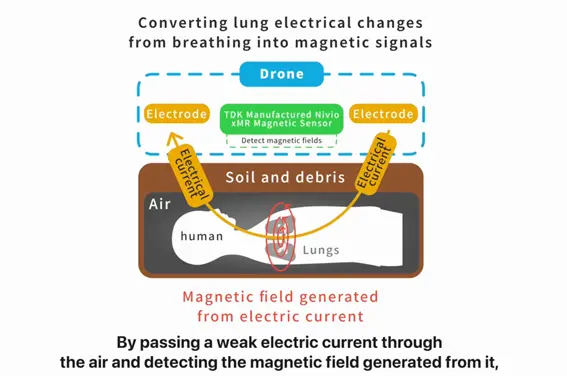
How CIMT Works (Simple Explanation)
- A very small electric current is generated in space using two electrodes.
- This current naturally creates a magnetic field.
- The current also flows through objects in the environment — including the human body.
- When a person is alive, their breathing causes tiny changes in the electrical properties of the lungs.
- These changes lead to minute fluctuations in the magnetic field.
- Ultra-sensitive magnetic sensors detect these tiny changes and identify the presence of a living person.
In simple terms, CIMT "listens" to breathing through magnetic signals, without touching the body.
Why CIMT Is So Powerful
1. Non-Contact and Safe
CIMT does not require physical contact, cameras, sound, or radiation. It works through rubble, soil, and obstacles, making it safe and highly reliable in harsh environments.
2. Detects Life, Not Just Objects
Unlike cameras, thermal sensors, or radar, CIMT focuses on living activity (breathing). This dramatically reduces false detections caused by debris, heat sources, or machinery.
3. Works Deep Underground
By adjusting the distance between electrodes, CIMT can detect signals from deeper underground, allowing it to find survivors buried far below the surface.
4. Real-Time and Fast
Signals are processed in real time, enabling immediate decision-making during rescue operations.
Experimental Validation
In experimental tests, the CIMT sensor unit was placed 47 cm above the floor, with 13 cm of simulated rubble between the sensor and the subject.
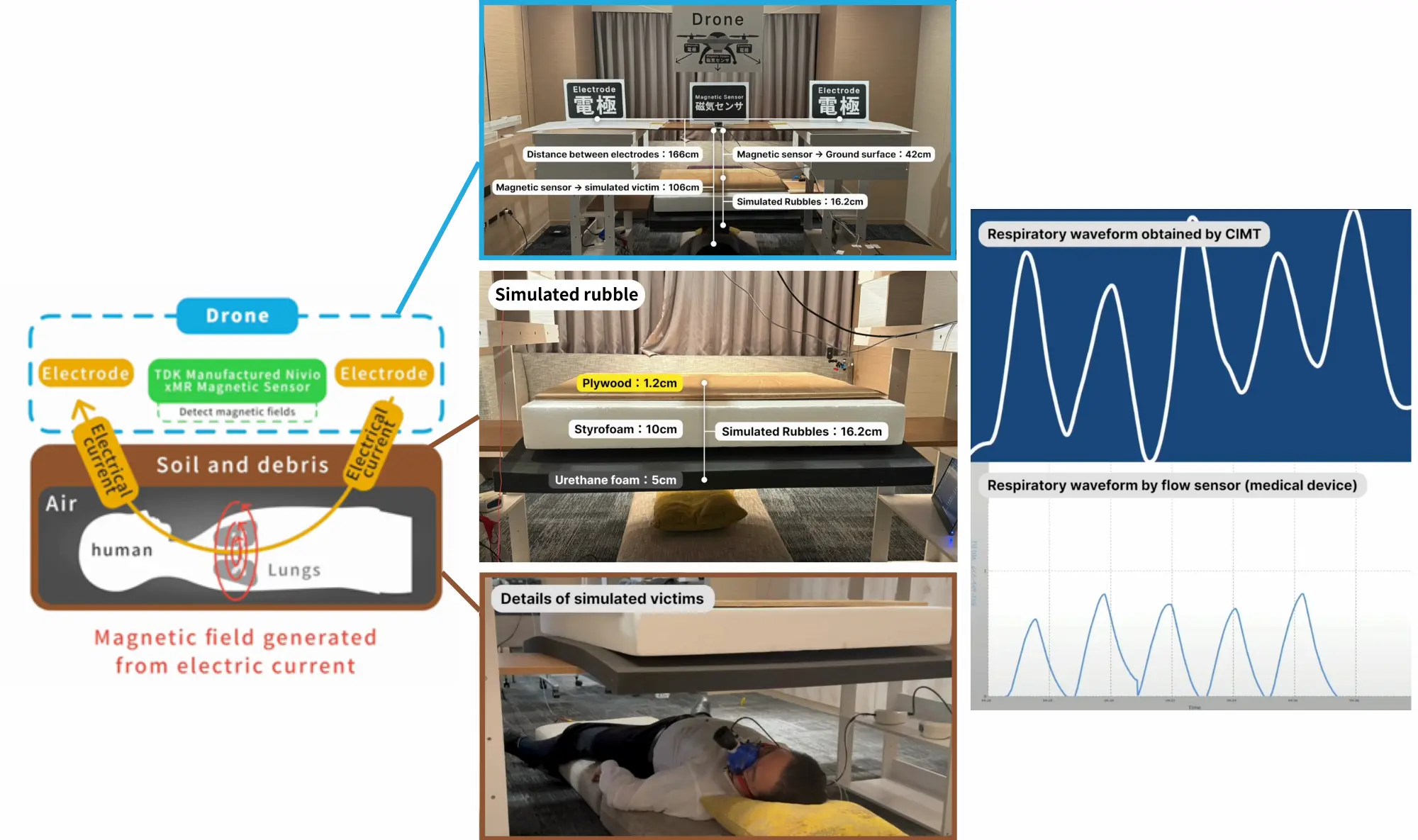
The results showed that:
- Human breathing could be detected clearly and accurately
- The CIMT sensor measured breathing signals comparable to a standard airflow meter
- This confirmed that survivors buried under rubble can be detected
During the demonstration, the person under the simulated rubble also wore a conventional abdominal respiration monitor for comparison. The breathing waveform detected by the CIMT sensor closely matched the waveform from the abdominal monitor, proving the accuracy of CIMT.

Applications Beyond Disaster Rescue
1. Infrastructure Inspection Using Robot Dogs
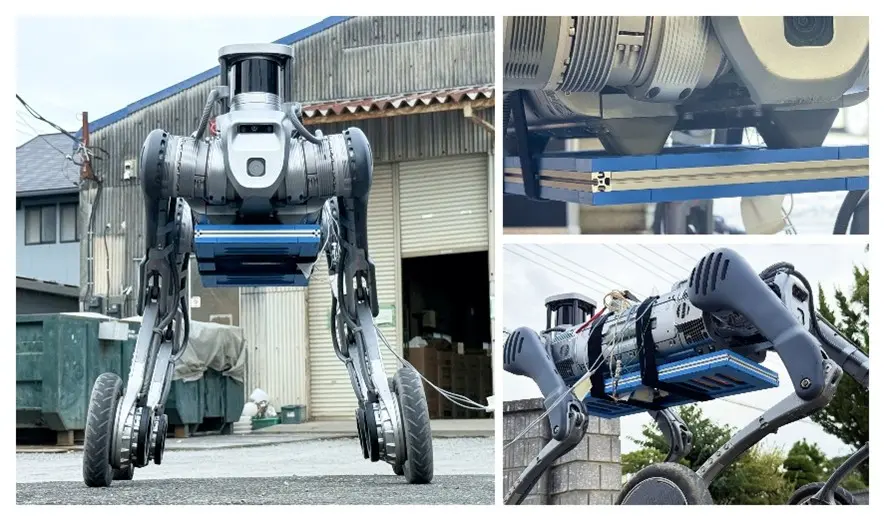
CIMT technology is not limited to rescue missions.
In one application, electrodes and CIMT sensors are mounted on the abdomen of a quadruped (dog-type) robot.
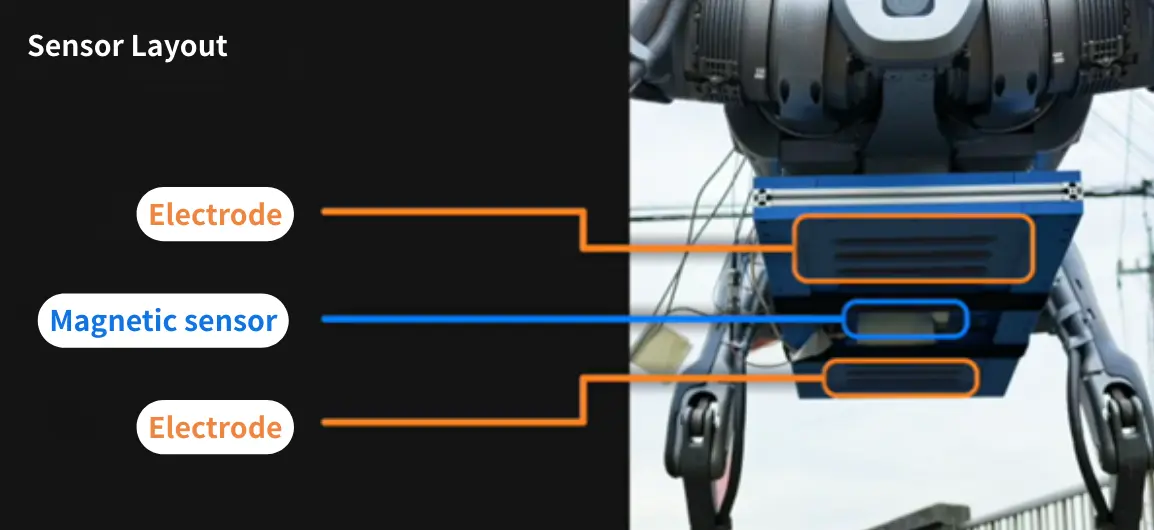
As the robot walks over the ground, it detects:
- Underground cavities
- Structural defects
- Weak or damaged areas beneath the surface
Traditional methods rely on tapping the ground with a hammer and listening for sound differences.
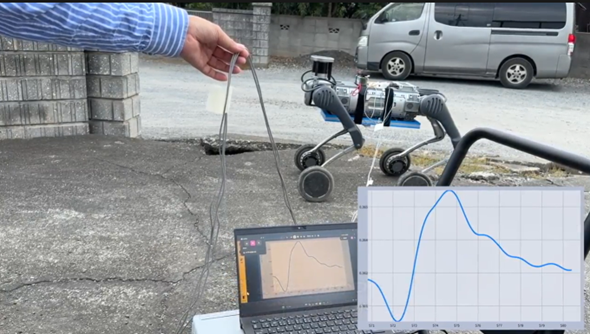
CIMT provides a far more accurate, objective, and efficient solution.
2. Non-Destructive Wall and Structure Inspection

Many infrastructures worldwide — bridges, tunnels, buildings, pipelines, dams — suffer from aging and hidden damage.
By mounting CIMT sensors on robot arms or humanoid robots, it becomes possible to:
- See inside walls without breaking them
- Detect metal bars, voids, cracks, and abnormalities
- Perform inspections safely and quickly
Magnetic fields can pass through concrete and other materials, allowing CIMT to function even when obstacles are present.
With AI-based analysis, CIMT systems can automatically assess risk levels in real time, reducing human workload and inspection costs.
This video demonstrates a non-contact sensing system mounted on a train model that can detect underground water leaks and hidden voids in real time while moving. Without touching the ground, the sensor continuously scans beneath the surface and identifies areas where water is present or where empty cavities (voids) exist.
This allows underground anomalies to be detected without excavation or damage, even during continuous motion.
Academic Recognition
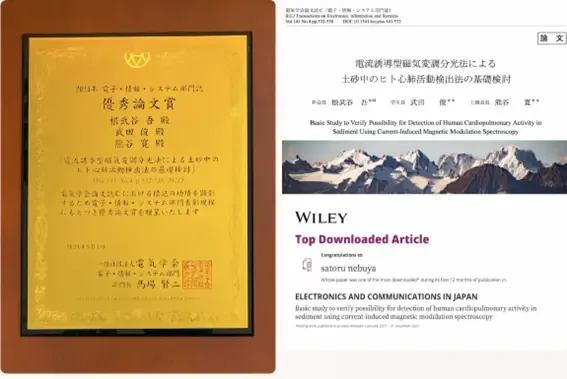
A research paper presenting CIMT as a life-detection technology for disaster victims was awarded the Excellent Paper Award by the Institute of Electrical Engineers of Japan (IEEJ).
The English version of the paper also became one of the most downloaded papers in its field, attracting strong international attention.
Paper Title:
Basic Study on Detection of Human Cardiopulmonary Activity in Soil Using Current-Induced Magnetic Modulation Spectroscopy
Journal:
IEEJ Transactions on Electronics, Information and Systems
Vol.141, No.4, pp.532–538